
工业机器人的分类
2021/5/6 21:19:19 人气:
一、工业机器人按臂部的运动形式分为四种:
1、直角坐标型的臂部可沿三个直角坐标移动;
2、圆柱坐标型的臂部可作升降、回转和伸缩动作;
3、球坐标型的臂部能回转、俯仰和伸缩;
4、关节型的臂部有多个转动关节。
二、工业机器人按执行机构运动的控制机能又可分点位型和连续轨迹型。
1、点位型只控制执行机构由一点到另一点的准确定位,适用于机床上下料、点焊和一般搬运、装卸等作业;
2、连续轨迹型可控制执行机构按给定轨迹运动,适用于连续焊接和涂装等作业。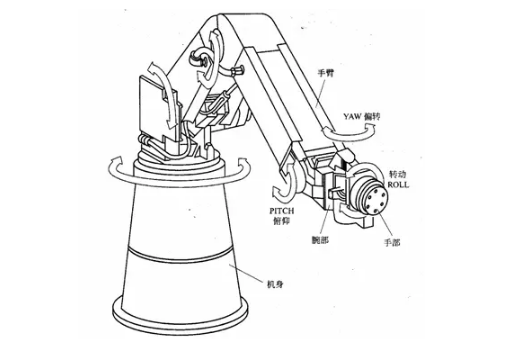
三、工业机器人按程序输入方式区分有编程输入型和示教输入型两类:
1、编程输入型是将计算机上已编好的作业程序文件,通过RS232串口或者以太网等通信方式传送到机器人控制柜。
2、示教输入型的示教方法有两种:
一种是由操作者用手动控制器(示教操纵盒),将指令信号传给驱动系统,使执行机构按要求的动作顺序和运动轨迹操演一遍;
另一种是由操作者直接领动执行机构,按要求的动作顺序和运动轨迹操演一遍。在示教过程的同时,工作程序的信息即自动存入程序存储器中在机器人自动工作时,控制系统从程序存储器中检出相应信息,将指令信号传给驱动机构,使执行机构再现示教的各种动作。示教输入程序的工业机器人称为示教再现型工业机器人。
四.智能工业机器人
具有触摸、力量或简单视觉的工业机器人可以在更复杂的环境中工作。如果它具有识别功能或进一步增加自适应和自学习功能,它将成为一个智能工业机器人。它可以根据人或自制程序给出的“宏指令”来适应环境,并自动完成更复杂的工作。

